Summary
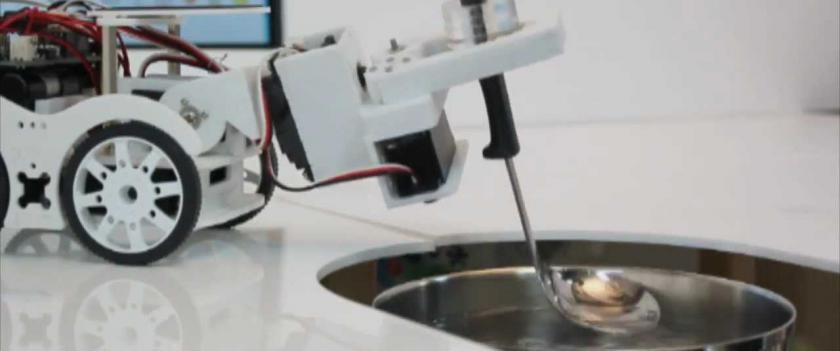
We propose a cooking system that operates in an open environment. The system cooks a meal by pouring various ingredients into a boiling pot on an induction heating cooker and adjusts the heating strength according to the user’s instructions. We then describe how the system incorporates robotic- and human-specific elements in a shared workspace so as to achieve a cooperative rudimentary cooking capability. First, we use small mobile robots instead of built-in arms to save space, improve flexibility and increase safety. Second, we use detachable visual markers to allow the user to easily configure the real-world environment. Third, we provide a graphical user interface to display detailed cooking instructions to the user. We hope insights obtained in this experiment will be useful for the design of other household systems in the future.